
Driving Intention Recognition and Lane-change Prediction on the highway
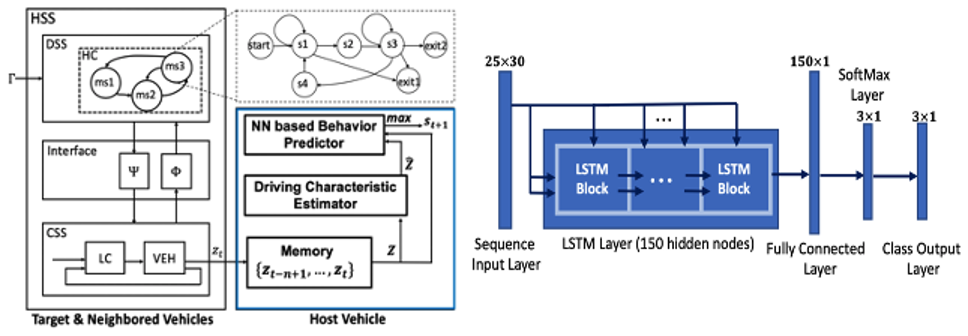
- Deterministic driver and lane-change decision making models are implemented to determine the Driving-Characteristic (D-Char).
- Genetic Algorithm (GA) with evolving Takagi-Sugeno (eTS) online clustering method is proposed for the D-char estimation, and Neural Network based Behavior Predictor is designed.
- Predictor is trained and evaluated by using NGSIM dataset (real traffic data).
- Prediction performance is compared by training the predictor w/ and w/o the estimated D-char.
- Prediction accuracy is higher when estimated D-Char is implemented for train and prediction.
- This project is sponsored by the National Science Foundation (NSF) Cyber-Physical Systems (CPS) project under contract #60046665.
- Publication(s): https://ieeexplore.ieee.org/document/8813987